Comparative Evaluation of VGG-16 and U-Net Architectures for Road Segmentation
Keywords:
Road segmentation, deep learning, VGG-16, U-Net, KITTI dataset, autonomous driving, comparative analysis, performance evaluationAbstract
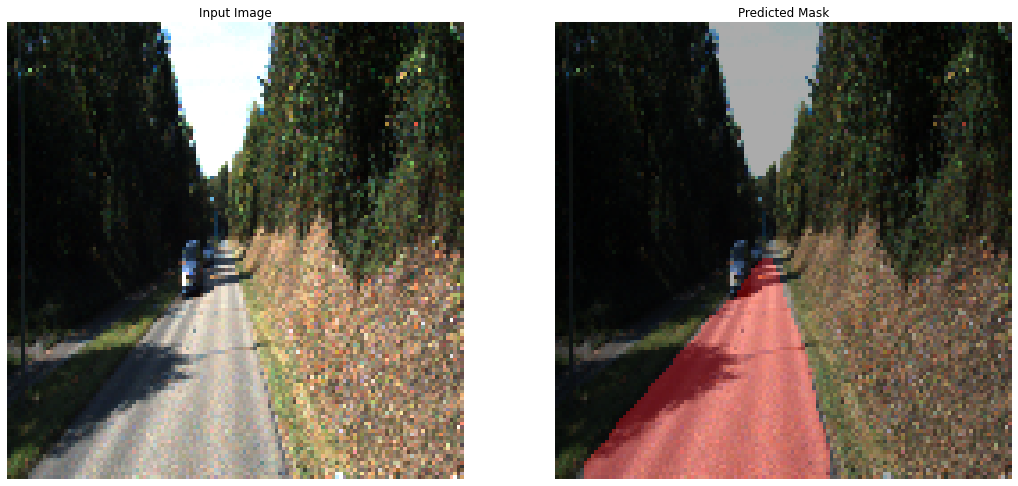
Accurate road segmentation is a fundamental task in autonomous driving and intelligent transportation systems. This study aims to compare the performance of two well-known deep learning architectures, VGG-16 and U-Net, for road segmentation on the KITTI dataset. The VGG-16 model is adapted for segmentation by using its convolutional layers as an encoder and incorporating a custom decoder for upsampling and generating the final segmentation mask. The U-Net model follows an encoder-decoder structure with skip connections to preserve spatial information and capture both high-level and low-level features. Both models are trained using a combination of binary cross-entropy and Dice coefficient losses, along with data augmentation techniques to improve robustness and generalization. Extensive experiments are conducted to evaluate the models' performance using a comprehensive set of metrics, including overall accuracy, mean Intersection over Union (mIoU), road IoU, precision, recall, and F1 score. The VGG-16 model achieves an overall accuracy of 0.95, mIoU of 0.85, and road IoU of 0.92, demonstrating its effectiveness in capturing road segments. The U-Net model slightly outperforms VGG-16, with an overall accuracy of 0.96, mIoU of 0.88, and road IoU of 0.94. Additionally, the U-Net model exhibits faster inference times, lower GPU memory usage, and a more compact model size compared to VGG-16. The results demonstrate the strong capabilities of both VGG-16 and U-Net architectures for road segmentation, with U-Net showing a slight edge in terms of performance and efficiency. This study contributes to the understanding of deep learning-based road segmentation and provides valuable insights for the development of reliable and efficient autonomous driving systems. Future research can explore techniques such as attention mechanisms, multi-scale feature fusion, or domain adaptation to further enhance the segmentation performance and generalization ability of the models.